

IT | 엔비디아 ROS 월드 2021 참가, 로봇운영체제 개발자 지원하는 새로운 ‘아이작 ROS’ 공개
엔비디아(www.nvidia.co.kr, CEO 젠슨 황)는 로봇운영체제(ROS) 개발자 컨퍼런스인 ROS 월드 2021(ROS World 2021)에서 ROS 개발자 커뮤니티에 성능인식 기술을 제공하기 위한 새로운 아이작(Isaac) ROS를 공개했다.
이는 제품 개발을 가속화하고, 성능을 향상시키며, 최첨단 컴퓨터 비전 및 AI/머신러닝 기능을 ROS 기반 로봇 애플리케이션에 통합하는 작업을 단순화하도록 지원한다.

<아이작 ROS GEM의 소프트웨어 블록 다이어그램>
성능을 최적화하는 아이작 ROS GEM
아이작 ROS GEM은 엔비디아 GPU 및 젯슨(Jetson) 라인업에 고도로 최적화된 DNN 기반 알고리즘과 포함해 이미지 처리와 컴퓨터 비전을 포괄하는 패키지를 제공한다.
동급 최고의 정확도 및 최적화된 성능 제공 GEM: 스테레오 시각적 주행거리 측정방법
오토노머스 머신은 다양한 환경에서 움직이므로 어디에 있는지 추적해야 한다. 시각적 주행거리 측정 방법(Visual Odometry)은 초기위치로 카메라의 상대적인 위치를 추정하여 이러한 문제를 해결한다. 스테레오 시각적 주행거리 측정 방법을 위한 아이작 ROS GEM은 ROS 개발자에게 강력한 기능을 제공한다.
이는 실시간 (>60fps @720p) 스테레오 카메라 시각적 주행거리 측정 솔루션을 위한 최고의 정확도를 제공한다. 널리 사용되는 KITTI 데이터베이스를 기반으로 공개된 결과는 여기에서 확인할 수 있다. 이 GPU 가속 패키지는 매우 정확할 뿐 아니라 상당히 빠르게 실행된다. 실제로 젯슨 자비에 AGX(Jetson Xavier AGX)에서 실시간으로 HD 해상도를 실행할 수 있다.
DNN 추론: ROS 개발자가 사용할 수 있는 모든 엔비디아 NGC DNN 추론 모델
DNN 추론(Inference) GEM은 개발자가 NGC에서 사용할 수 있는 엔비디아의 수많은 추론모델을 사용하거나 자체 DNN을 제공할 수 있는 ROS2 패키지 세트다. 사전 훈련된 모델의 추가 조정 또는 개발자 고유의 맞춤형 모델 최적화는 엔비디아 타오(TAO) 툴킷을 사용하면 된다.
최적화 후 이러한 패키지는 엔비디아 추론서버인 텐서RT(TensorRT) 또는 트리톤(Triton)에 의해 배포된다. 최적의 추론성능은 엔비디아 고성능 추론 소프트웨어개발키트(SDK)인 텐서RT를 활용하는 노드에서 달성된다. 원하는 DNN 모델이 텐서RT에서 지원되지 않는 경우 트리톤을 사용하여 모델을 배포해야 한다. GEM에는 U-Net과 DOPE에 대한 기본 지원이 포함된다. 텐서RT를 기반으로 하는 U-Net 패키지는 이미지에서 의미적 분할 마스크(semantic segmentation masks)를 생성하는 데 사용할 수 있다. 그리고 DOPE 패키지는 감지된 모든 물체에 대한 3D 포즈 추정(3D pose estimation)에 사용할 수 있다.
이 툴은 ROS 애플리케이션에 고성능 AI 추론을 통합하는 가장 빠른 방법이다.

<아이작 ROS GEM을 통한 합성 이미지>
아이작 심 출시일정
2021년 11월에 정식 출시되는 아이작 심(Isaac Sim)은 현재까지 가장 개발자 친화적인 버전이다. UI, 성능 및 유용한 구성요소 전반의 다양한 개선을 통한 향상된 시뮬레이션으로 보다 빠른 개발이 가능해진다. 또한 향상된 ROS 브릿지와 더 많은 ROS 샘플은 ROS 개발자의 개발자 경험을 향상시킨다. 정식 출시되는 새로운 기능은 다음과 같다.
성능 향상, 메모리 사용량 및 시작 시간 단축
격자 지도(Occupancy Map) 생성 개선, URDF 임포터
새로운 환경: 대규모 창고, 사무실, 병원
로봇, 물체, 환경과의 통신을 위한 새로운 파이썬(Python) 구성 요소
ROS/ROS2 브릿지, 뎁스포인트클라우드(Depth point cloud), 라이다포인트 클라우드(Lidar point cloud) 성능 향상
업데이트 샘플
ROS2를 사용한 멀티 로봇 내비게이션
주피터(Jupyter)에서 학습환경특성 랜덤화(Domain Randomization)을 사용한 SDG
새로운 합성 데이터 생성 워크플로우: 아이작 심의 프로덕션 데이터 세트
오토노머스 로봇에는 인식 스택을 실행하는 수많은 AI 모델을 훈련시키기 위해 크고 다양한 데이터세트가 필요하다. 실제 시나리오에서 이러한 모든 교육 데이터를 가져오는 것은 많은 비용을 요구하고, 코너케이스(corner case)의 경우 잠재적인 위험성 또한 동반한다. 아이작 심을 통한 새로운 합성 데이터 워크플로우는 오토노머스 로봇의 안전 및 품질 우려를 해결하고 양질의 데이터세트를 축하기 위해 설계됐다.
데이터 세트를 구축하는 개발자는 장면, 장면 자체, 조명 및 합성 센서의 확률적 분포를 제어할 수 있다. 개발자는 또한 중요한 코너 케이스들이 데이터셋에 포함되게 돕는 세밀한 제어 기능 또한 포함한다. 이 워크플로우는 감사 및 안전 목적의 데이터세트 복제를 위한 버전 지정(versioning) 및 디버깅 정보(debugging information)을 지원한다.
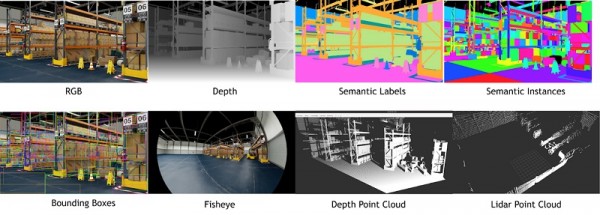
<아이작 심의 센서 라이브러리에 있는 합성 데이터 예시>
아이작 ROS를 시작하는 데 관심이 있는 개발자는 여기에서 더 자세히 배울 수 있다.
GTC 2021에서 더 많은 제품 출시
11월 8일부터 11일까지 진행되는 GTC에서 오픈로보틱스의 CEO인 브라이언 거키(Brian Gerkey)의 프레젠테이션을 포함한 로봇 개발자들을 위한 트랙과 저명한 스피커들이 참여해 세션을 진행한다. GTC에서는 엔비디아 젯슨, 아이작 OS, 아이작 심과 아이작 짐(Isaac GYM)에 대해 논의된다.
엔비디아, NVIDIA, 로봇운영체제, ROS, 개발자 컨퍼런스, ROS 월드 2021, ROS World 2021, ROS 개발자 커뮤니티, 성능인식 기술, 새로운, 아이작 ROS, Isaac ROS, 공개











